
Как сделать манипулятор
Как сделать манипулятор
На этой страничке я хочу поделиться накопленным опытом создания манипуляторов. Если Вы не можете позволить себе купить более-менее приличный джойстик, то его вполне можно сделать самому. Если вы уже имеете джойстик, то может Вам захочется его переделать? Тут мы и обсудим, как джойстик сделать, и как его переделать.
Итак, все джойстики можно классифицировать по разным основаниям, из них актуальны для нас способ подключения и тип датчиков.
По способу подключения джойстики подразделяются на джойстики с USB подключением и Game Port подключением. Можно ли самостоятельно сделать с нуля джойстик на USB мне неведомо, однако я полагаю, что это если и возможно, то только высококвалифицированным радиоинженерам. Иное дело переделать готовый USB джойстик под свой вкус и свои потребности. Это доступно практически каждому, умеющему держать в руках паяльник. Сделать с нуля джойстик на Game Port несложно, и вполне по силам каждому человеку, умеющему и любящему возиться с пластмассовыми и железными цацками. 🙂
По типу датчиков джойстики подразделяются на джойстики, построенные на оптических датчика, на переменных резисторах и на магнитных резисторах. Каждый из перечисленных типов может быть сделан на Game Port. Единственное НО заключается в том, что я не имею ни малейшего представления о магнитных резисторах, поэтому буду рассказывать только об оптике и переменных резисторах.
На мой взгляд, самое пристальное внимание при создании собственного джойстика нужно уделить его механике. Главный враг на этом фронте – люфт. Как можно его побороть? Мое решение нельзя назвать простым, легким и дешевым. Однако можно назвать его механически совершенным. Заключается оно в том, что все поворотные узлы собираются на подшипниках качения с двойной опорой каждой детали. Такая конструкция обладает тремя достоинствами – полным отсутствием люфта, чертовской прочностью и высочайшей точностью позиционирования. Немаловажен еще и плавный ход, исключающий рывки и неравномерности движения.
Далее нужно обеспечить прочность. Этот вопрос я решаю полным исключением пластмассы из поворотных узлов и перенимающих нагрузку деталей. Из пластмассы я делаю только корпуса.
Далее выбираем тип электронной начинки. Оптика или резисторы? Оптика точнее, она исключает дрожание. Однако оптика весьма непроста в установке и настройке. Резисторы проще в монтаже. Но нужно быть очень разборчивым в выборе резисторов, покупать импортные и не дешевые, иначе обеспечено дрожание, которое испортит все впечатление.
Начнем с механики. Вот посмотрите, здесь я нарисовал поворотный узел моего самодельного джойстика. Используются шариковые подшипники внешним диаметром 19 и внутренним 6 мм. Все подшипники вставлены и закреплены в выточенных круглых металлических шайбах, толщиной 12 мм.
Итак, мы видим, что весь узел состоит из трех основных узлов: узла крена, тангажа и качалки.
Пыльник покупается от шаровой Жигулей, но не большой, а маленький, с диаметром резинки 14 мм. Как раз под трубку ручки. Этот пыльник помимо защиты механизма от пыли и посторонних взглядов, подпружинивает ручку, и держит ее в среднем положении.
Чтобы воздействовать на качалку болт крепления трубки просверлен в центре, и в него вкручен болт с резьбой М3 без шляпки. Этот болт передает момент на качалку.
Накладки я делал из винипласта толщиной 10 мм. Далее сверлил в центре отверстие, и запрессовывал в нем подшипник (силой вдавливал. Держится превосходно). Сами подшипники извлекаются из 3.5 кулера (бловера), если он на подшипниках качения.
Вот снимок механики:

Сделав узел механики (на это может уйти несколько месяцев), нужно сделать корпус. Тут уж вам полный простор. Я для этого использую винипласт. Применяется он на промышленном производстве при монтаже электрических узлов. Толщина варьируется от 3 мм и до неизвестности. Самый толстый я видел 30 мм. Нам нужен толщиной не менее 8 мм для запаса прочности.
Винипласт очень прочный, эластичный, и хорошо обрабатывается. Из него можно склеить бокситкой любой корпус, на ваш вкус. Сгладите углы, покрасите – от заводского никто не отличит. Тут, правда, есть один нюанс. Для того, чтобы корпус был прочнее, и смотрелся более пристойно, я делаю так.

Потом монтируем поворотный узел к корпусу, и сам джойстик почти готов.
Если конструкцию покрасить, и дополнить большим пыльником, то выйдет примерно это:

Как видите джойстик напольный. Сама ручка с военного Ми-8 (такие ставились и на Ми-24).
Но почему почти готов? А потому что нет педалей.
Самое сложное в педалях, это сделать их в пристойном облике, чтобы они не напоминали пыточный инструмент 🙂 Вот взгляните.
Технология проста. Берем нужный кусок текстолита, нагреваем ровно посередине, и перегибаем на острый угол (более 90 градусов). Угол нужен такой, чтобы торец педали в среднем положении был на минимальном расстоянии от поверхности, а в крайних положениях расстояние от торца до поверхности было равным. Далее делаем в вертикальной поверхности две вертикальные прорези на требуемый ход педалей. Потом берем две небольшие дверные петли, выпиливаем по их ширине и требуемой длине сами педали, и соединяем петли, педали и остов.
Потом делаем стальные направляющие, прикручиваем их к педалям. Стальные направляющие подвергаются токарной обработке – в нужных местах прослабляются, чтобы с них не спадала резинка (резинка залита синим), а в нужных утолщаются, поскольку сквозь эту толщину пойдет струна (на рисунке залита красным), обеспечивающая обратную связь педалей. Сама струна должна быть прочна и тонка. Я использовал для ее роли прочную матерчатую изоляцию электрического кабеля. Сойдет и бельевая капроновая веревка. Эту веревку нужно протянуть через два блока. Желательно чтобы эти блоки были собраны на шариковых подшипниках, и имели канавки, чтобы струна не спадала. Блоки крепятся на болтах диаметром 6 мм. Меньше нельзя, поскольку это несущий узел, работать будем ногами, и нужна прочность.
Далее подпружиниваем педали как показано на рисунке с помощью двух резинок от бигудей.
На рисунке я изобразил способ крепления резистора, и передачи на него момента. Устроить оптическую схему еще проще. Все электромеханическое хозяйство закрывается пластмассовым кожухом.
В настоящее время я делаю себе новые педали, принципиально иной конструкции. После того, как закончу работу, сделаю необходимые рисунки и положу тут с пояснениями.
. прошло несколько месяцев.
Вот и пришел тот час, когда я могу приступить к описанию новых педалей.
Изрядно полетав (больше года) на педалетках (так я называю педали вышеприведенного типа, их еще можно обозвать автопедалями), я осознал, что созрел для повышения уровня реализма 🙂 Педалетки вышли в отставку, и были подарены товарищу.
Все началось с раздумий по поводу конструкции. Вообще, самое сложное и главное в педалестроении (как и вообще в творчестве) – это сначала полностью построить педали в голове и на бумаге. Только после этого, следует переходить к материальному воплощению педалей. Если не следовать данному принципу, неизбежны постоянные переделки, что выливается, в конечном счете, в обезображивание конструкции, и приводит к изысканию новых материалов.
Давайте определимся с сущностью хардкорных авиапедалей.
- Работают по принципу обратной связи (давишь одну педаль от себя – вторая идет к тебе);
- Сами педали при нажатии не меняют горизонтальный угол установки;
- Расстояние между педалями должно соответствовать аналогичному расстоянию в реальных самолетах;
- Педали подпружинены, и имеют отчетливо ощущаемую ногами, нейтральную точку позиционирования.
Для того, чтобы такие педали работали, нужно:
- Большая площадь контакта основания педалей с полом для исключения опрокидывания конструкции;
- Исключить возможность скольжения основания педалей по полу;
Внутренний диаметр «стакана» этой стойки, и его глубина позволяют разместить в нем прочный узел механики будущих педалей.
Сам узел можно изготовить вручную, а можно заказать у токаря/фрезеровщика. В любом случае придется купить два подшипника, внешним диаметром 40 мм.
Еще одной проблемой, которую не удалось решить с ходу, оказалась центровка педалей. Я попробовал два варианта. Реализуя первый, я попытался захватить пружинами саму штангу педалей с двух сторон. Однако это был неверный путь, поскольку пружины были тугие, и одна из сторон педалей всегда упиралась в пружину, которая была уже сжата. Во втором случае я просверлил штангу по центру горизонтально, и приделал туда болт, на который накинул пружину. Этот вариант оказался неплохим, разве что не обеспечивал точно ощущаемой нейтральной зоны. Как позже выяснилось, примененный для центровки болт диаметром 6 мм оказался недостаточно прочным, и подгибался.
Также веселая история произошла с ограничителями хода педалей. Я изначально задумал сделать ограничители, и потратил немало времени на их монтаж. Там тоже были свои варианты, свои ошибки и единственно-возможное решение. Однако, когда я однажды снял ограничители и попробовал педали без них, я пришел к выводу о ненужности ограничителей. Это обусловлено тем, что если подпружинить педали в достаточной степени, вывернуть их на критический для резистора угол просто невозможно, применяя разумные усилия на педалях – пружина не дает вывернуть больше, и начинает двигаться вся конструкция. Иными словами, чтобы своротить голову резюку, нужно специально задаться этой целью, и упереться в одну педаль всей массой. Однако в этом случае можно легко сломать и ограничитель, и всю систему подпружинивания. А раз так, то ограничители не нужны. Выглядело все так:

В общем, помучившись некоторое время с резистором, я решил пересадить резистор наверх. Для этого потребовалась переделка существенных узлов конструкции механического узла, поскольку подпружинивались педали сверху. На этот раз я решил обратиться к токарю. Сделал чертеж, который тут привожу. Если есть желание пойти по моим стопам, то рисунок можно сохранить на диск, распечатать на принтере, и нести токарю.
Для того, чтобы смонтировать полученную конструкцию в основании нужно просверлить основание и нарезать в отверстиях резьбу, дабы болтами зафиксировать узел в стакане.
Быть или не быть? Вот каким вопросом озадачимся в первом абзаце. Нет, поймите меня правильно, РУД как таковой, безусловно, необходим на джойстике, дело в том, должен ли он быть отдельным от джойстика? Однозначный ответ можно дать только в том случае, если Ваш джойстик напольный. Если напольный – то отдельный РУД необходим. А если джой настольный? И для управления двигателем у него предусмотрен соответствующий рычажок (ползунок)? Тут уж дело каждого. Зависит от взглядов вирпила на жизнь его вирпильскую, на долю его горемычную 🙂 Мое мнение однозначно – если джой настольный, то водружать на стол еще одну коробку с рычагом для управления двигателем, есть не что иное, как повод для истерики в курятнике. Курам понравится, и они будут смеяться так, что может даже полопаются.
Надеюсь Вы определились с необходимостью для вас отдельного РУД. Если жизнь Ваша без отдельного РУД представляется Вам серой и мрачной, то продолжаем прения 🙂
Итак, каковы основные требования к РУД?
- Плавный ход без рывков, неравномерности в перемещении;
- Тугой ход. Тугой настолько, чтобы РУД удерживался в том положении, в котором Вы его отпустили, и не перемещался от колебаний эфира :-);
- Достаточный вес и размер основания, чтобы при манипуляциях РУД основание РУД не ерзало по столу (стулу);
- Удобная ручка;
- Достаточная амплитуда перемещения РУД.
Как будем реализовывать эти требования? Плавность обеспечим построением механизма на шариковых подшипниках. Тугого хода добьемся применением подтормаживающей системы. Вес увеличим грузами. Размеры сделаем достаточными. Наконец, амплитуду отрегулируем по потребностям.
Начнем, по традиции с блока механики.
Первым вопросом тут будет вариант базового крепления узла механики. Возможны следующие варианты:
Смотрим на рисунке:
Каждый вариант имеет свои плюсы и минусы.
Первый вариант предпочтительнее тем, что при его применении предельно облегчен доступ к содержимому РУД – снял нижнюю крышку и оперируй как Пирогов 🙂 Минусы заключаются в том, что, во-первых, сам корпус РУД должен быть достаточно прочным и толстым, во-вторых, на верхней панели появятся две шляпки болтов (нам, эстетам, это не пристало), и в третьих, длина штока РУД сокращается, и соответственно сокращению, закругляется траектория хода РУД.
Плюсом второго варианта является большая длина штока РУД, возможность использовать для корпуса основания РУД материал потоньше, отсутствуют шляпки болтов на верхней части основания, усилия на РУД распределяются более удачно в плане устойчивости конструкции. Недостатком второго варианта является затрудненный доступ в утробу основания. Для вскрытия потребуется открутить нижнюю крышку, и сам механизм от крышки. Да и механика будет частично скрыта гранью уголка-крепежа.
Третий вариант обладает всеми плюсами второго (если механизм крепить к нижней крышке). Единственный его крупный минус – необходимость изготавливать ограничители движения РУД (в первых вариантах амплитуда движения РУД ограничивается величиной прорези в корпусе), что касается мелкого минуса, то он заключается в том, что выглядит 2 вариант менее основательно, нежели первые два. Да, чуть не забыл – плюс еще в том, что нет прорези на верхней панели, и грязюка в корпус не попадает.
Я избрал третий вариант. Причина в том, что у меня вышел весь материал для изготовления нормального корпуса. Когда достану материал переделаю по варианту 2. А Вы решайте сами. Как говорится, исходя из способностей и потребностей 🙂
Да, кстати, возможен еще один вариант, а именно:
Данный вариант предпочтительней для любителей «ретро» :-), он принципиально похож на РУД Як-3. Однако данная схема имеет один существенный минус – в рукоятках затруднительно разместить кнопки и дополнительные оси. И уж тем более сложно этими осями и кнопками пользоваться. Налицо ограниченная функциональность.
В общем ладно. С этим вроде закончили, выбор делать Вам, а я немножко его облегчил, поскольку указал на плюсы и минусы. Умываю руки 🙂
Теперь перейдем к рассмотрению непосредственно блока механики РУД. Потребуются два шариковых подшипника внутренним диаметром 7 мм. Если Вы избрали нижнюю схему, то, соответственно, четыре подшипника. Также советую обзавестись уголком с гранями 70 мм, либо просто пластиной стали, толщиной не менее 5 мм (в этом случае придется при реализации верхней схемы № 3 крепить механику к крышке). Смотрим рисунок, вид сбоку:
Как видно на рисунке, на болт с резьбой М6 надет шток РУД, далее надета металлическая трубка (желательно чтобы ее внутренний диаметр позволял сесть на болт впритирку) длиной 10 мм, потом идет подшипник, снова трубка, но чуть подлиннее (20-30 мм), опять подшипник, и все это накрепко затянуто гайкой. Конец болта предварительно обработан на наждаке, чтобы его диаметр был 3-4 мм.
После сборки системы, на металлической пластине просверливаются четыре отверстия, и к пластине с помощью хомутов крепятся подшипники. Это видно на следующем рисунке:
Устройство тормозящей системы, думаю, очевидно. Сила торможения регулируется затяжкой гайки на шпильке. В качестве тормозящей прокладки я избрал полоски кожи (замши), поскольку кожа не крошится как резина и не замусоривает механизм. Тормоз действует достаточно долго, и не ослабляется.
Когда Вы закончите сборку механического узла, останется только прикрепить пластину-основание согласно выбранному варианту (к нижней крышке либо к верхней части корпуса). Как к механике подвесить резюк, думаю, понятно.
Шток РУД можно сделать как из трубки (стального прута), так и из пластины. Я использовал полоску текстолита, толщиной 8мм, и шириной приблизительно 40 мм. Слегка изогнул ее на конце, и прикрепил к изогнутому концу ручку.
Теперь о корпусе. Корпус основания можно сделать самому, а можно взять готовую пластмассовую коробку нужных размеров. Если решили сделать, то я рекомендую руководствоваться советами в разделе Общие сведения. Механика, где я рассказывал как делаю корпуса.
Внутренности корпуса можно нашпиговать различным железом для утяжеления конструкции. И, наконец, снабдите нижнюю крышку резиновыми наклейками для увеличения трения корпуса РУД и поверхности.
Напоследок пару слов о непосредственно ручке РУД. Ее можно сделать по-разному. Руководствуйтесь собственными пожеланиями. Я избрал для ручки полый пластмассовый стакан и закручивающейся крышкой. Полый потому, что в нем я разместил кнопки и резистор управления шагом винта. Как это сделать посмотрите рисунок:
Итак, ручка руда – это такой «стакан» из полупрозрачной, белой пластмассы с толстыми стенками. Сей стакан я обнаружил случайно. В нем я у дома сверла хранил 🙂 Стакан сделан как конус, и в широкой части имеет резьбу, на которую накручивается крышка. Эту крышку я прикрепил (четырьмя болтами М4) к толстой полосе изогнутого текстолита, сделал отверстие чтобы пропустить многожильный провод. На крышку накручивается стакан – вот и весь руд.
В верхней (глухой) части стакан просверлен, и в него вделан резюк (отечественный, 150 кОм, подпаян вместо трастмастеровского к плате. У отечественного большая амплитуда поворота опрашивается, а у родного мизерный угол опроса). Далее на глухую часть с внешней стороны крепится (тремя болтами М4) самодельная шайба из толстого текстолита, призвание которой – скрыть гайку, крепящую резюк к стакану, и убрать зазор между маховичком резистора и торцом стакана. На шток резюка одет маховичок от узла фотоувеличителя, который (счастливое совпадение) подходит по диаметру к стакану. Вживую он выглядит так:

Вот как на нем лежит рука:

В заключение хочу добавить, что все, что я тут описал, делается без привлечения посторонних людей. Все что нужно – тиски, ножовка по металлу, дрель, слесарный набор (сверла, метчики и лерки). Я также использовал наждачный станочек собственного изготовления. Если у Вас его нет, то не отчаивайтесь – напильник и руки творят чудеса. Остальные инструменты (пассатижи, кусачки и проч.), думаю, у всех имеются.
Рука-манипулятор своими руками: как сделать?
Мы рассмотрим, как делается рука-манипулятор своими руками, на промышленных образцах. Сначала будут затронуты общие вопросы, потом технические характеристики результата, детали, а под конец и сам процесс сборки.
 Создание данного устройства в целом не должно вызвать каких-то сложностей. Необходимо будет качественно продумать только возможности механических движений, что будет довольно сложно осуществить с физической точки зрения, чтобы рука-манипулятор выполняла поставленные перед ней задачи.
Создание данного устройства в целом не должно вызвать каких-то сложностей. Необходимо будет качественно продумать только возможности механических движений, что будет довольно сложно осуществить с физической точки зрения, чтобы рука-манипулятор выполняла поставленные перед ней задачи.
Будет рассматриваться образец с параметрами длины/высоты/ширины соответственно 228/380/160 миллиметров. Вес руки-манипулятора, своими руками сделанной, будет составлять примерно 1 килограмм. Для управления используется проводной дистанционный пульт. Ориентировочное время сборки при наличии опыта – около 6-8 часов. Если его нет, то могут уйти дни, недели, а при попустительстве и месяцы, чтобы была собрана рука-манипулятор. Своими руками и одному в таких случаях стоит делать разве что для своего собственного интереса. Для движения составляющих используются коллекторные моторы. Приложив достаточно усилий, можно сделать прибор, который будет поворачиваться на 360 градусов. Также для удобства работы, кроме стандартного инструментария вроде паяльника и припоя, необходимо запастись:
- Удлинёнными плоскогубцами.
- Боковыми кусачками.
- Крестовой отверткой.
- 4-мя батарейками типа D.
Пульт дистанционного управления можно реализовать, используя кнопки и микроконтроллер. При желании сделать дистанционное беспроводное управление элемент контроля действий понадобится и в руке-манипуляторе. В качестве дополнений необходимы будут только устройства (конденсаторы, резисторы, транзисторы), которые позволят стабилизировать схему и передавать по ней в нужные моменты времени ток необходимой величины.
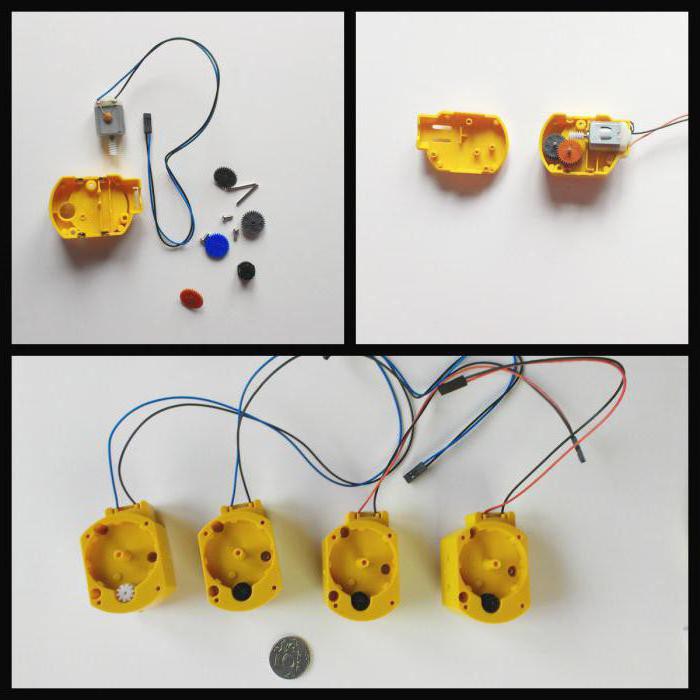 Для регуляции количества оборотов можно использовать переходные колесики. Они позволят сделать движение руки-манипулятора плавными.
Для регуляции количества оборотов можно использовать переходные колесики. Они позволят сделать движение руки-манипулятора плавными.
Также необходимо позаботится о том, чтобы провода не усложняли её движения. Оптимальным будет проложить их внутри конструкции. Можно сделать всё и извне, такой подход сэкономит время, но потенциально может привести к сложностям в перемещении отдельных узлов или всего устройства. А теперь: как сделать манипулятор?
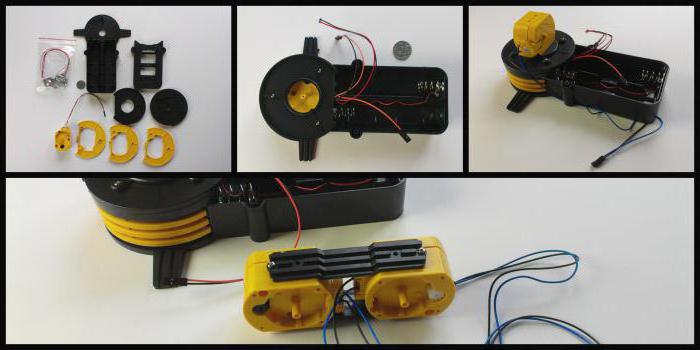
 Теперь приступаем непосредственно к созданию руки-манипулятора. Начинаем с основания. Необходимо обеспечить возможность поворота устройства во все стороны. Хорошим решением будет его размещение на дисковой платформе, которая приводится во вращение с помощью одного мотора. Чтобы она могла вращаться в обе стороны, существует два варианта:
Теперь приступаем непосредственно к созданию руки-манипулятора. Начинаем с основания. Необходимо обеспечить возможность поворота устройства во все стороны. Хорошим решением будет его размещение на дисковой платформе, которая приводится во вращение с помощью одного мотора. Чтобы она могла вращаться в обе стороны, существует два варианта:
- Установка двух двигателей. Каждый из них будет отвечать за поворот в конкретную сторону. Когда один работает, второй пребывает в состоянии покоя.
- Установка одного двигателя со схемой, которая сможет заставить его крутится в обе стороны.
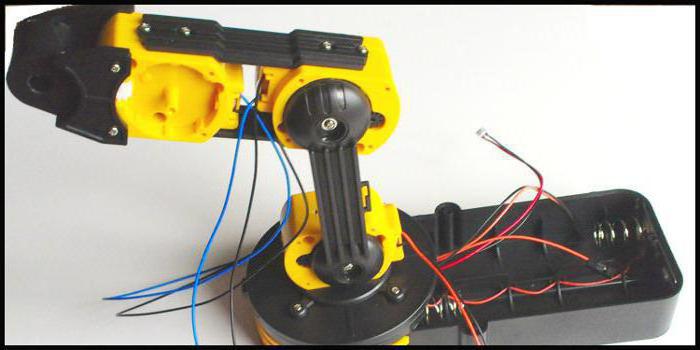
Какой из предложенных вариантов выбрать, зависит исключительно от вас. Далее делается основная конструкция. Для комфорта работы необходимо два «сустава». Прикреплённый к платформе должен уметь наклоняться в разные стороны, что решается с помощью двигателей, размещённых в его основании. Ещё один или пару следует разместить в месте локтевого изгиба, чтобы часть захвата можно было перемещать по горизонтальной и вертикальной линии системы координат. Далее, при желании получить максимальные возможности, можно установить ещё двигатель в месте запястья. Далее наиболее необходимое, без чего не представляется рука-манипулятор. Своими руками предстоит сделать само устройство захвата. Тут существует множество вариантов реализации. Можно дать наводку по двум самым популярным:
- Используется только два пальца, которые одновременно сжимают и разжимают объект захвата. Является самой простой реализацией, которая, правда, обычно не может похвастаться значительной грузоподъёмностью.
- Создаётся прототип человеческой руки. Тут для всех пальцев может использоваться один двигатель, с помощью которого будет осуществляться сгиб/разгиб. Но можно сделать и конструкцию сложней. Так, можно к каждому пальцу подсоединить по двигателю и управлять ими отдельно.
Далее остаётся сделать пульт, с помощью которого будет оказываться влияние на отдельные двигатели и темпы их работы. И можно приступать к экспериментам, используя робот-манипулятор, своими руками сделанный.
 Рука-манипулятор своими руками предоставляет широкие возможности для творческих измышлений. Поэтому предоставляются вашему вниманию несколько реализаций, которые можно взять за основу для создания своего собственного устройства подобного предназначения.
Рука-манипулятор своими руками предоставляет широкие возможности для творческих измышлений. Поэтому предоставляются вашему вниманию несколько реализаций, которые можно взять за основу для создания своего собственного устройства подобного предназначения.
Любая представленная схема манипулятора может быть усовершенствована.
 Важным в робототехнике является то, что практически не существует ограничения по функциональному улучшению. Поэтому при желании создать настоящее произведение искусства не составит труда. Говоря о возможных путях дополнительного улучшения, следует отметить кран-манипулятор. Своими руками сделать такое устройство не составит труда, одновременно оно позволит приучить детей к творческому труду, науке и конструировании. А это в свою очередь позитивно может сказаться на их будущей жизни. Сложно ли будет сделать кран-манипулятор своими руками? Это не так проблемно, как может показаться на первый взгляд. Разве что стоит позаботиться о наличии дополнительных мелких деталей вроде троса и колёс, по которым он будет крутиться.
Важным в робототехнике является то, что практически не существует ограничения по функциональному улучшению. Поэтому при желании создать настоящее произведение искусства не составит труда. Говоря о возможных путях дополнительного улучшения, следует отметить кран-манипулятор. Своими руками сделать такое устройство не составит труда, одновременно оно позволит приучить детей к творческому труду, науке и конструировании. А это в свою очередь позитивно может сказаться на их будущей жизни. Сложно ли будет сделать кран-манипулятор своими руками? Это не так проблемно, как может показаться на первый взгляд. Разве что стоит позаботиться о наличии дополнительных мелких деталей вроде троса и колёс, по которым он будет крутиться.
Источники:
Как сделать манипулятор
Как сделать манипулятор На этой страничке я хочу поделиться накопленным опытом создания манипуляторов. Если Вы не можете позволить себе купить более-менее приличный джойстик, то его вполне можно
http://www.joysticks.ru/joysticks/handmade/how_to_make_manipulator.shtml
Рука-манипулятор своими руками как сделать
Как сделать себе руку-манипулятор? Сложен ли этот процесс? Что для этого необходимо иметь? Какие есть подводные камни?
http://fb.ru/article/237461/ruka-manipulyator-svoimi-rukami-kak-sdelat